Notice: Undefined variable: 5133.7113252074 in /var/www/www-root/data/www/374.ru/tpl_text/text_picture.php on line 81
 |
| –≠―²–Ψ Halluc II βÄî ―¹―Ä–Α–Ζ―É –Η –Ε–Η–≤–Ψ―²–Ϋ–Ψ–Β, –Η –Ϋ–Α―¹–Β–Κ–Ψ–Φ–Ψ–Β, –Η ―²―Ä–Α–Ϋ―¹–Ω–Ψ―Ä―²–Ϋ–Ψ–Β ―¹―Ä–Β–¥―¹―²–≤–Ψ. –•–Α–Μ―¨, ―΅―²–Ψ –Ϋ–Β –Ω―΄–Μ–Β―¹–Ψ―¹ βÄî –≤ ―ç―²–Ψ–Φ –Α–Φ–Ω–Μ―É–Α –Ψ–Ϋ –Φ–Ψ–≥ –±―΄ –Ω―Ä–Η–≥–Ψ–¥–Η―²―¨―¹―è ―É–Ε–Β ―¹–Β–Ι―΅–Α―¹ (―³–Ψ―²–Ψ ―¹ ―¹–Α–Ι―²–Α itpro.nikkeibp.co.jp). |
 |
| –£–Ψ―² ―²–Α–Κ –≤―¹―é –Ε–Η–Ζ–Ϋ―¨: ―Ö–Ψ―΅–Β―à―¨ "―â―ë–Μ–Κ–Ϋ―É―²―¨" ―΅―²–Ψ-–Ϋ–Η–±―É–¥―¨ –≤ –Ϋ–Β–Ψ–±―΄―΅–Ϋ–Ψ–Φ ―Ä–Α–Κ―É―Ä―¹–Β, –Κ–Α–Κ ―¹–Α–Φ –Ε–Β –≤ ―ç―²–Ψ–Φ –Ϋ–Β–Ψ–±―΄―΅–Ϋ–Ψ–Φ ―Ä–Α–Κ―É―Ä―¹–Β –Η –Ψ–Κ–Α–Ζ―΄–≤–Α–Β―à―¨―¹―èβÄΠ (―³–Ψ―²–Ψ AP/Itsuo Inouye). |
Notice: Undefined variable: 5129.760395069 in /var/www/www-root/data/www/374.ru/tpl_text/text_picture.php on line 81
 |
| "–ê–Μ–Μ–Ψ! –Γ–Μ―É–Ε–±–Α –Ω–Ψ–¥–¥–Β―Ä–Ε–Κ–Η? –€–Ψ–Ι –Ϋ–Ψ–≤―΄–Ι iPhone –≤–Β–¥―ë―² ―¹–Β–±―è –Κ–Α–Κ-―²–Ψ ―¹―²―Ä–Α–Ϋ–Ϋ–ΨβÄΠ" (–≤–Η–¥–Β–Ψ pinktentacle3/youtube.com). |
 |
| –ê –≤–Ψ―² "–™–Μ―é–Κ –¥–≤–Α" –≤ –Ω―Ä–Ψ―Ü–Β―¹―¹–Β –±―΄―¹―²―Ä–Ψ–≥–Ψ –≤―Ä–Α―â–Β–Ϋ–Η―è –≤–Ψ–Κ―Ä―É–≥ ―¹–≤–Ψ–Β–Ι –Ψ―¹–Η. –ù–Η―΅–Β–≥–Ψ –Ϋ–Β –Ω–Ψ–Ϋ―è―²–Ϋ–Ψ, –Ζ–Α―²–Ψ –Ϋ–Α–Ζ–≤–Α–Ϋ–Η–Β ―Ä–Ψ–±–Ψ―²–Α –Ψ–Ω―Ä–Α–≤–¥–Α–Ϋ–Ψ –Ϋ–Α –≤―¹–Β ―¹―²–Ψ (―³–Ψ―²–Ψ AP/Itsuo Inouye). |
 |
| –™–Μ–Α–≤–Ϋ―΄–Ι ―Ä–Α–Ζ―Ä–Α–±–Ψ―²―΅–Η–Κ Halluc II βÄî –Δ–Α–Κ–Α―é–Κ–Η –Λ―É―Ä―É―²–Α (Takayuki Furuta) βÄî –¥–Β–Φ–Ψ–Ϋ―¹―²―Ä–Η―Ä―É–Β―², ―΅―²–Ψ ―Ä–Ψ–±–Ψ―²–Ψ―²–Β―Ö–Ϋ–Η–Κ–Α βÄî –Μ―ë–≥–Κ–Ψ–Β –¥–Β–Μ–Ψ: –≤―¹–Β–≥–Ψ –¥–≤–Α–¥―Ü–Α―²―¨ –Κ–Η–Μ–Ψ–≥―Ä–Α–Φ–Φ–Ψ–≤ (―³–Ψ―²–Ψ ―¹ ―¹–Α–Ι―²–Α robot.watch.impress.co.jp). |
 |
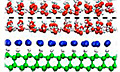
| –Γ–Μ–Β–≤–Α βÄî ―Ä–Β–Ε–Η–Φ "–Δ―Ä–Α–Ϋ―¹–Ω–Ψ―Ä―²". –£ ―Ü–Β–Ϋ―²―Ä–Β βÄî "–ù–Α―¹–Β–Κ–Ψ–Φ–Ψ–Β". –Γ–Ω―Ä–Α–≤–Α βÄî "–•–Η–≤–Ψ―²–Ϋ–Ψ–Β" (―³–Ψ―²–Ψ ―¹ ―¹–Α–Ι―²–Α techon.nikkeibp.co.jp). |
 |
| –Λ–Ψ―²–Ψ–≥–Β–Ϋ–Η―΅–Ϋ―΄–Ι "–™–Μ―é–Κ –¥–≤–Α" ―¹–Ϋ–Α–±–Ε―ë–Ϋ ―¹–Η―¹―²–Β–Φ–Ψ–Ι ―¹–Β–Ϋ―¹–Ψ―Ä–Ψ–≤, –Η –Η–Ζ–Φ–Β―Ä–Η―²–Β–Μ–Β–Ι ―Ä–Α―¹―¹―²–Ψ―è–Ϋ–Η―è –¥–Ψ –Ψ–±―ä–Β–Κ―²–Ψ–≤, –Κ–Ψ―²–Ψ―Ä―΄–Β –Ϋ–Β –¥–Α―é―² –Β–Φ―É –Ϋ–Β–Ψ–Ε–Η–¥–Α–Ϋ–Ϋ–Ψ ―¹–Ω–Ψ―²–Κ–Ϋ―É―²―¨―¹―è –Ψ–±–Ψ ―΅―²–Ψ-―²–Ψ –Η–Μ–Η –≤―Ä–Β–Ζ–Α―²―¨―¹―è –≤ –Ω―Ä–Β–Ω―è―²―¹―²–≤–Η–Β βÄî –¥–Α–Ε–Β –Β―¹–Μ–Η –Ψ–Ω–Β―Ä–Α―²–Ψ―Ä―É ―ç―²–Ψ–≥–Ψ –Ψ―΅–Β–Ϋ―¨ ―Ö–Ψ―΅–Β―²―¹―è (―³–Ψ―²–Ψ ―¹ ―¹–Α–Ι―²–Α robot.watch.impress.co.jp). |
 |
| "–ü–Ψ―à―ë–Μ –Ω–Ψ ―¹–≤–Ψ–Η–Φ –¥–Β–Μ–Α–Φ". –ü–Μ–Α–≤–Ϋ–Ψ―¹―²―¨ –Ω–Β―Ä–Β–Φ–Β―â–Β–Ϋ–Η―è Halluc II –Ψ–±–Β―¹–Ω–Β―΅–Η–≤–Α―é―² 56 –Φ–Ψ―²–Ψ―Ä–Ψ–≤ βÄî –Ω–Ψ –¥–≤–Α –Ϋ–Α –Κ–Α–Ε–¥―΄–Β ―²―Ä–Η ―¹―É―¹―²–Α–≤–Α –Κ–Α–Ε–¥–Ψ–Ι –Ϋ–Ψ–≥–Η –Η –Ω–Ψ –Ψ–¥–Ϋ–Ψ–Φ―É –Φ–Ψ―²–Ψ―Ä―É –Ϋ–Α –Κ–Α–Ε–¥–Ψ–Β –Κ–Ψ–Μ–Β―¹–Ψ. –£–Ψ―² –Β―â―ë –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Β ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ–Η ―Ä–Ψ–±–Ψ―²–Α: –¥–Μ–Η–Ϋ–Α βÄî 805 –Φ–Η–Μ–Μ–Η–Φ–Β―²―Ä–Ψ–≤, –Φ–Α–Κ―¹–Η–Φ–Α–Μ―¨–Ϋ―΄–Ι ―É–≥–Ψ–Μ –Ϋ–Α–Κ–Μ–Ψ–Ϋ–Α –Ω–Μ–Ψ―¹–Κ–Ψ―¹―²–Η βÄî 40¬Α, –Φ–Α–Κ―¹–Η–Φ–Α–Μ―¨–Ϋ–Α―è –≤―΄―¹–Ψ―²–Α –Ω―Ä–Β–Ψ–¥–Ψ–Μ–Β–≤–Α–Β–Φ–Ψ–≥–Ψ –Ω―Ä–Β–Ω―è―²―¹―²–≤–Η―è βÄî 125 –Φ–Η–Μ–Μ–Η–Φ–Β―²―Ä–Ψ–≤ (―³–Ψ―²–Ψ ―¹ ―¹–Α–Ι―²–Α robot.watch.impress.co.jp). |
–£ ―ç―²–Ψ–Φ ―Ä–Β–Ε–Η–Φ–Β Halluc II ―²–Ψ–Ε–Β ―Ö–Ψ–¥–Η―², ―Ä–Α–Ζ–Ϋ–Η―Ü–Α ―²–Ψ–Μ―¨–Κ–Ψ –≤ ―²–Ψ–Φ, ―΅―²–Ψ –Ψ–Ϋ –Ψ–Ω–Η―Ä–Α–Β―²―¹―è –Ϋ–Α ―²–Ψ―Ä―Ü–Β–≤―΄–Β ―¹―²–Ψ―Ä–Ψ–Ϋ―΄ –Κ–Ψ–Μ―ë―¹–Η–Κ–Ψ–≤, –Ϋ–Β –≤―Ä–Α―â–Α―è –Η–Φ–Η, –Α –Μ–Α–Ω―΄ –Ω―Ä–Η ―ç―²–Ψ–Φ –Ϋ–Β ―Ä–Α―¹―²–Ψ–Ω―΄―Ä–Β–Ϋ―΄ –≤ ―Ä–Α–Ζ–Ϋ―΄–Β ―¹―²–Ψ―Ä–Ψ–Ϋ―΄. –ü–Β―Ä–Β–Φ–Β―â–Α―²―¨―¹―è –Ζ–Α ―¹―΅―ë―² ―ç―²–Ψ–≥–Ψ –Ψ–Ϋ –Φ–Ψ–Ε–Β―² –Κ–Α–Κ ―É–≥–Ψ–¥–Ϋ–Ψ βÄî ―Ö–Ψ―²―¨ –Κ―Ä–Α–¥―É―΅–Η―¹―¨.
–ö–Ψ–Ϋ–Β―΅–Ϋ–Ψ, –≤ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄―Ö ―¹–Η―²―É–Α―Ü–Η―è―Ö –Ϋ–Β―² ―¹–Φ―΄―¹–Μ–Α –Ω–Ψ–Μ―¨–Ζ–Ψ–≤–Α―²―¨―¹―è –Κ–Α–Κ–Η–Φ-―²–Ψ ―¹―²―Ä–Ψ–≥–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ―ë–Ϋ–Ϋ―΄–Φ ―¹―²–Η–Μ―è–Φ–Η –¥–≤–Η–Ε–Β–Ϋ–Η―è βÄî –Ω–Ψ―Ä–Ψ–Ι –Η―Ö –Ω―Ä–Η―Ö–Ψ–¥–Η―²―¹―è –Κ–Ψ–Φ–±–Η–Ϋ–Η―Ä–Ψ–≤–Α―²―¨. –ê –Η–Ϋ–Ψ–≥–¥–Α, –Ϋ–Α–Ψ–±–Ψ―Ä–Ψ―², –¥–≤–Η–Ε–Β–Ϋ–Η―è –¥–Ψ–Μ–Ε–Ϋ―΄ –±―΄―²―¨ –Ϋ–Α―¹―²–Ψ–Μ―¨–Κ–Ψ –Ω―Ä–Η–Φ–Η―²–Η–≤–Ϋ―΄–Φ–Η, ―΅―²–Ψ –Ψ–Ϋ–Η –Ϋ–Β –¥–Ψ―²―è–≥–Η–≤–Α―é―² –Ϋ–Η –¥–Ψ –Κ–Α–Κ–Ψ–≥–Ψ ―¹―²–Η–Μ―è.
–ù–Α–Ω―Ä–Η–Φ–Β―Ä, –Β―¹–Μ–Η ―Ä–Ψ–±–Ψ―²―É –Ϋ―É–Ε–Ϋ–Ψ –≤–Ζ–Ψ–±―Ä–Α―²―¨―¹―è –Ϋ–Α ―¹―²―É–Ω–Β–Ϋ―¨–Κ―É, –Ψ–Ϋ –¥–Ψ–Μ–Ε–Β–Ϋ –Ω–Ψ–Ω–Α―Ä–Ϋ–Ψ ―¹―²–Α–≤–Η―²―¨ –¥―Ä―É–≥ –Ζ–Α –¥―Ä―É–≥–Ψ–Φ –Κ–Ψ–Μ―ë―¹–Α –Ϋ–Α –Ϋ–Β―ë. –€―É–¥―Ä–Η―²―¨ –Ζ–¥–Β―¹―¨ –Ψ―¹–Ψ–±–Β–Ϋ–Ϋ–Ψ –Ϋ–Β –Ϋ―É–Ε–Ϋ–Ψ: –Μ―é–±–Ψ–Ι –¥―Ä―É–≥–Ψ–Ι ―¹–Ω–Ψ―¹–Ψ–± –¥–≤–Η–Ε–Β–Ϋ–Η―è –≤ ―ç―²–Ψ–Φ ―¹–Μ―É―΅–Α–Β –Ψ–Κ–Α–Ε–Β―²―¹―è ―¹–Μ–Η―à–Κ–Ψ–Φ ―ç–Ϋ–Β―Ä–≥–Ψ–Ζ–Α―²―Ä–Α―²–Ϋ―΄–Φ –Η –Φ–Α–Μ–Ψ―É–¥–Ψ–±–Ϋ―΄–Φ.
–£–Ω―Ä–Ψ―΅–Β–Φ, –≤―¹―ë ―ç―²–Ψ –≤―΄ –≤–Ω–Ψ–Μ–Ϋ–Β –Φ–Ψ–Ε–Β―²–Β ―É–≤–Η–¥–Β―²―¨ ―¹–Α–Φ–Η, –Ω–Ψ―¹–Φ–Ψ―²―Ä–Β–≤ –Ω–Α―Ä―É ―Ä–Ψ–Μ–Η–Κ–Ψ–≤ –Ϋ–Α YouTube βÄî 1 & 2.
–†–Α–Ζ―Ä–Α–±–Ψ―²―΅–Η–Κ–Η Halluc II –Ψ―΅–Β–Ϋ―¨ –Ϋ–Α–¥–Β―é―²―¹―è, ―΅―²–Ψ –Η―Ö –¥–Β―²–Η―â–Β ―É–Ε–Β –Ψ―΅–Β–Ϋ―¨ ―¹–Κ–Ψ―Ä–Ψ –±―É–¥–Β―² –Ω―Ä–Η–Φ–Β–Ϋ―è―²―¨―¹―è –Ϋ–Α –Ω―Ä–Α–Κ―²–Η–Κ–Β. –†–Β–Ζ–Ψ–Ϋ–Ϋ―΄–Ι –≤–Ψ–Ω―Ä–Ψ―¹: –Ϋ–Α –Κ–Α–Κ–Ψ–Ι ―²–Α–Κ–Ψ–Ι –Ω―Ä–Α–Κ―²–Η–Κ–Β? –†–Α–Ζ―É–Φ–Ϋ―΄–Ι –Ψ―²–≤–Β―²: –≤ –Ψ―¹–Ϋ–Ψ–≤–Ϋ–Ψ–Φ –Ϋ–Α ―¹–Ω–Α―¹–Α―²–Β–Μ―¨–Ϋ―΄―Ö –Ψ–Ω–Β―Ä–Α―Ü–Η―è―Ö –≤ ―¹–Μ–Ψ–Ε–Ϋ―΄―Ö ―É―¹–Μ–Ψ–≤–Η―è―Ö βÄî –¥–Μ―è –¥–Ψ―¹―²–Α–≤–Κ–Η –≥―Ä―É–Ζ–Ψ–≤ –Η ―²―Ä–Α–Ϋ―¹–Ω–Ψ―Ä―²–Η―Ä–Ψ–≤–Κ–Η –Ω–Ψ―¹―²―Ä–Α–¥–Α–≤―à–Η―Ö –Μ―é–¥–Β–Ι. –ù–Ψ –¥–Μ―è ―ç―²–Ψ–≥–Ψ ―Ä–Ψ–±–Ψ―², –Κ–Α–Κ –Φ–Η–Ϋ–Η–Φ―É–Φ, –¥–Ψ–Μ–Ε–Β–Ϋ –±―É–¥–Β―² –Ϋ–Β–Φ–Ϋ–Ψ–≥–Ψ "–Ω–Ψ–¥―Ä–Α―¹―²–Η".
–ü–Ψ –Ψ―Ü–Β–Ϋ–Κ–Α–Φ –Η–Ζ–Ψ–±―Ä–Β―²–Α―²–Β–Μ–Β–Ι, ―ç―²–Ψ–≥–Ψ ―¹―΅–Α―¹―²–Μ–Η–≤–Ψ–≥–Ψ –¥–Ϋ―è –Ϋ–Α–Φ –Ε–¥–Α―²―¨ –Ϋ–Β–¥–Ψ–Μ–≥–Ψ βÄî –≤―¹–Β–≥–Ψ –Μ–Β―² –Ω―è―²―¨.
–Ξ–Ψ―²–Η―²–Β –Ω―Ä–Ψ–Κ–Ψ–Φ–Φ–Β–Ϋ―²–Η―Ä–Ψ–≤–Α―²―¨?
–ö―Ä–Ψ–Φ–Β ―²–Ψ–≥–Ψ...
–ö–Α–Κ–Η–Β ―¹–Β–Κ―Ä–Β―²―΄ ―¹–Κ―Ä―΄–≤–Α–Β―² NASA?
–ë―΄–≤―à–Η–Β ―¹–Ψ―²―Ä―É–¥–Ϋ–Η–Κ–Η –Α–Φ–Β―Ä–Η–Κ–Α–Ϋ―¹–Κ–Ψ–≥–Ψ –Κ–Ψ―¹–Φ–Η―΅–Β―¹–Κ–Ψ–≥–Ψ –Α–≥–Β–Ϋ―²―¹―²–≤–Α NASA...
–£ –Θ–Μ―¨―è–Ϋ–Ψ–≤―¹–Κ–Β –Η–Ζ–Ψ–±―Ä–Β–Μ–Η –Ω―Ä–Β–Ω–Α―Ä–Α―², ―¹–Ω–Ψ―¹–Ψ–±–Ϋ―΄–Ι –Φ–Β–Ϋ―è―²―¨ –≤–Ϋ–Β―à–Ϋ–Ψ―¹―²―¨ ―΅–Β–Μ–Ψ–≤–Β–Κ–Α
–û―΅–Β―Ä–Β–¥–Ϋ–Ψ–Β –Ψ―²–Κ―Ä―΄―²–Η–Β ―¹–¥–Β–Μ–Α–Μ...
I
...